Overview
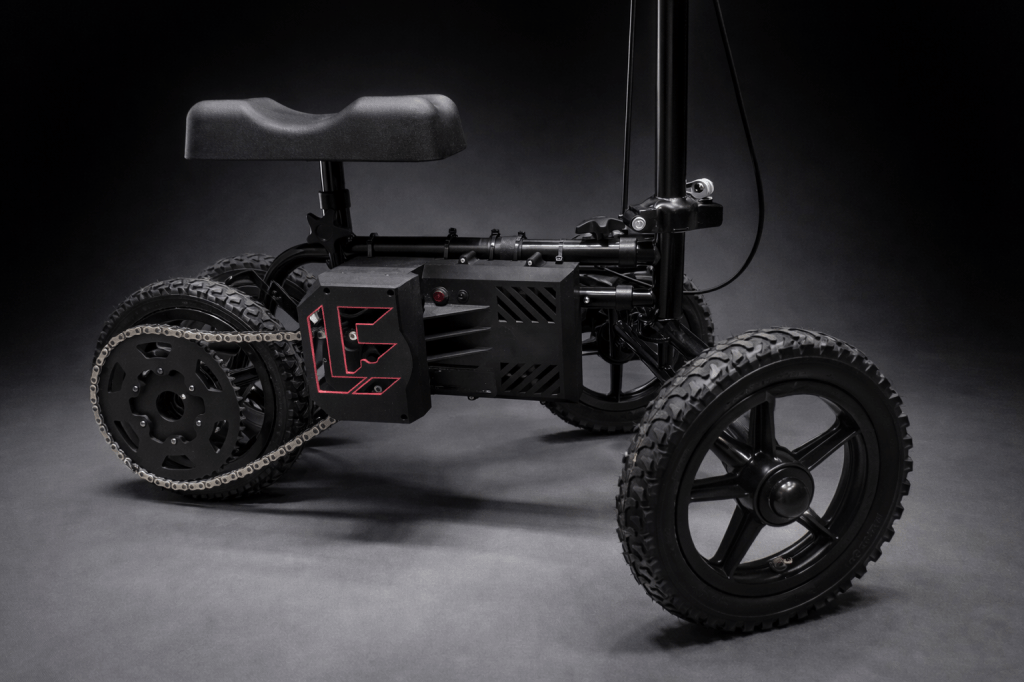
Project Mobility focuses on developing compact electric mobility solutions using repurposed components and custom mechanical design. The project explores drivetrain design, gear reduction, and structural integration to convert high-speed electric motors into reliable, high-torque systems capable of transporting a rider efficiently.
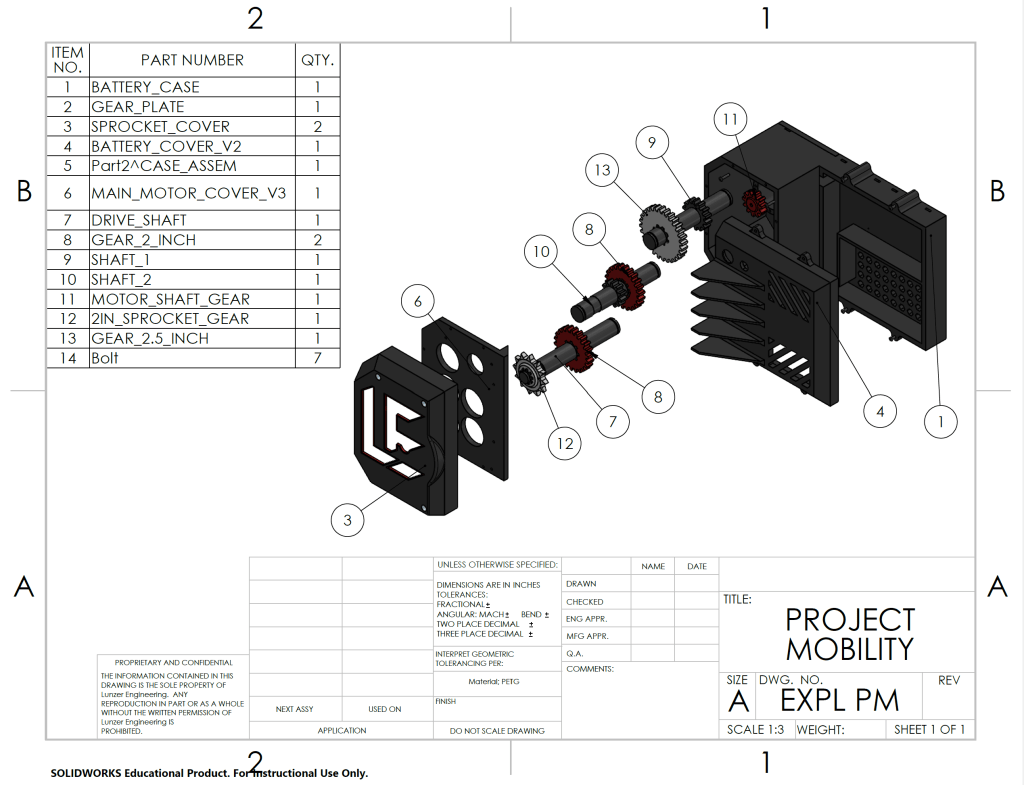
CAD Design
This section shows the digital design process used to develop the drivetrain and overall vehicle layout. CAD modeling was used to visualize component placement, refine gear geometry, and ensure proper clearances before fabrication and assembly.
Project Specifications
Motor
• Repurposed electric scooter motor
Motor Speed
• ~5000 RPM (no-load)
Gear Reduction
• 32:1 total reduction ratio
Drive System
• Chain and sprocket drivetrain
Rider Capacity
• Designed for ~180 lb rider
Purpose
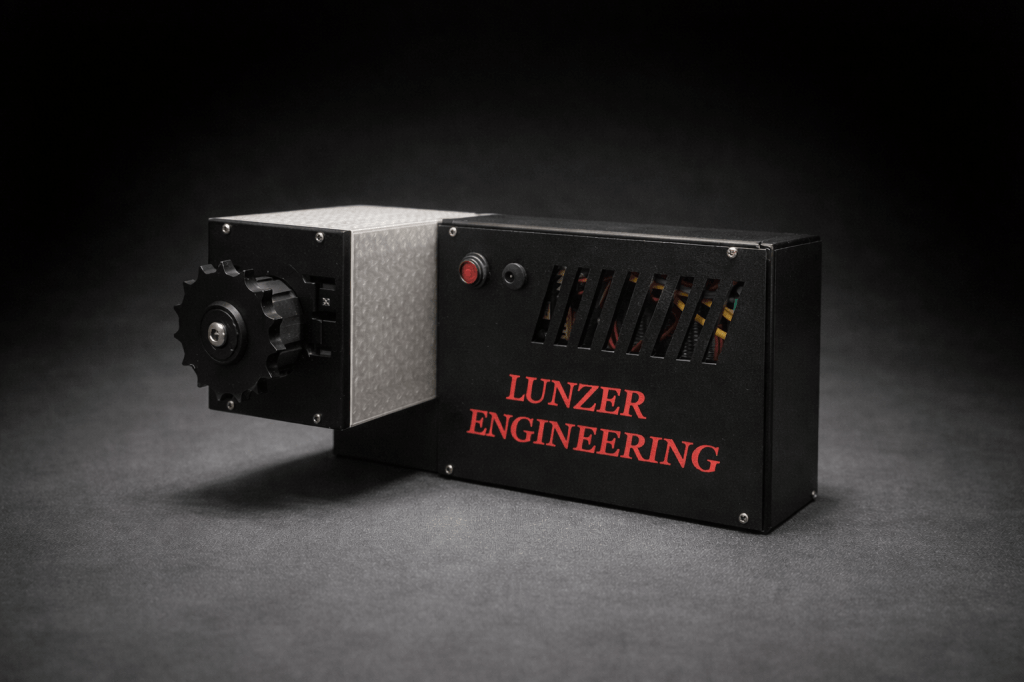
• Compact electric mobility platform
Design Focus
• High torque at low speeds
• Efficient power transfer
• Simple mechanical layout
Design Path & Key Changes
During development, several adjustments were made to ensure the drivetrain could reliably convert high motor speed into usable torque while maintaining mechanical strength.
Major Design Adjustments
• Higher Gear Reduction
The original motor operated around 5000 RPM, which was far too fast for the application. The drivetrain was redesigned with a 32:1 gear reduction so the final output speed would fall between 200–500 RPM, providing much more usable torque for rider movement.
• Gear Pressure Angle Optimization
The gear geometry was modified by changing the pressure angle to the standard 20°, improving load distribution between the gear teeth. This change increased durability and reduced the likelihood of tooth failure under torque.

• Shaft Material Selection
The shaft material was revised to achieve the correct balance between stiffness and toughness. The goal was to keep the shaft rigid enough to maintain proper gear alignment while avoiding excessive brittleness that could cause the shaft to snap under torque loads.
Result
These changes allowed the drivetrain to operate more efficiently and reliably, ensuring the motor power could be translated into smooth, controlled movement without premature mechanical failure.
Additional Notes
- Additional Notes & Future Improvements
- During the later stages of development, the drivetrain system was paired with a Bluetooth joystick controller, allowing wireless control of throttle input. This addition simplified the control system and demonstrated how the platform could integrate modern electronic interfaces with the mechanical drivetrain.
Potential Improvements
- Integrated battery enclosure to improve protection and packaging of electrical components.
- Refined gear housing to further protect the drivetrain from debris and wear.
- Improved chain tensioning system for easier maintenance and adjustment.
- More compact electronics layout to reduce overall size and weight of the drivetrain unit.
- Expanded control system with adjustable speed modes and safety cutoffs.
- These improvements would help move the platform from a prototype mobility system toward a more refined and user-friendly electric vehicle solution.
Conclusion
Project Mobility demonstrates how thoughtful mechanical design can transform a high-speed electric motor into a practical mobility solution through proper gearing, structural design, and iterative refinement. Through testing and redesign—from drivetrain ratios to material selection—the project evolved into a reliable prototype capable of delivering usable torque and controlled motion.
Beyond the final build, the project provided valuable insight into real-world engineering challenges such as load distribution, drivetrain efficiency, and balancing strength with durability. The result is a compact electric mobility platform that highlights the importance of iteration, analysis, and hands-on prototyping in mechanical design.
